Skip to content
HOME
OUR PUBLICATIONS
BOOKS
JOURNALS
SPECIAL PUBLICATION
PUBLISH WITH US
BOOKS
JOURNALS
NexSymp
NexSymp 2026
Mainpage
AI-CREM 2026
BIZSCOM 2026
INNOV-AI 2026
SITWE 2026
SNAIL 2026
STERO 2026
NexSymp 2025
IAWC
2026
2025
2024
2023
Webinars
MY CART
Main menu
Previous article
MyCITE Pre-Audit Workshop
Next article
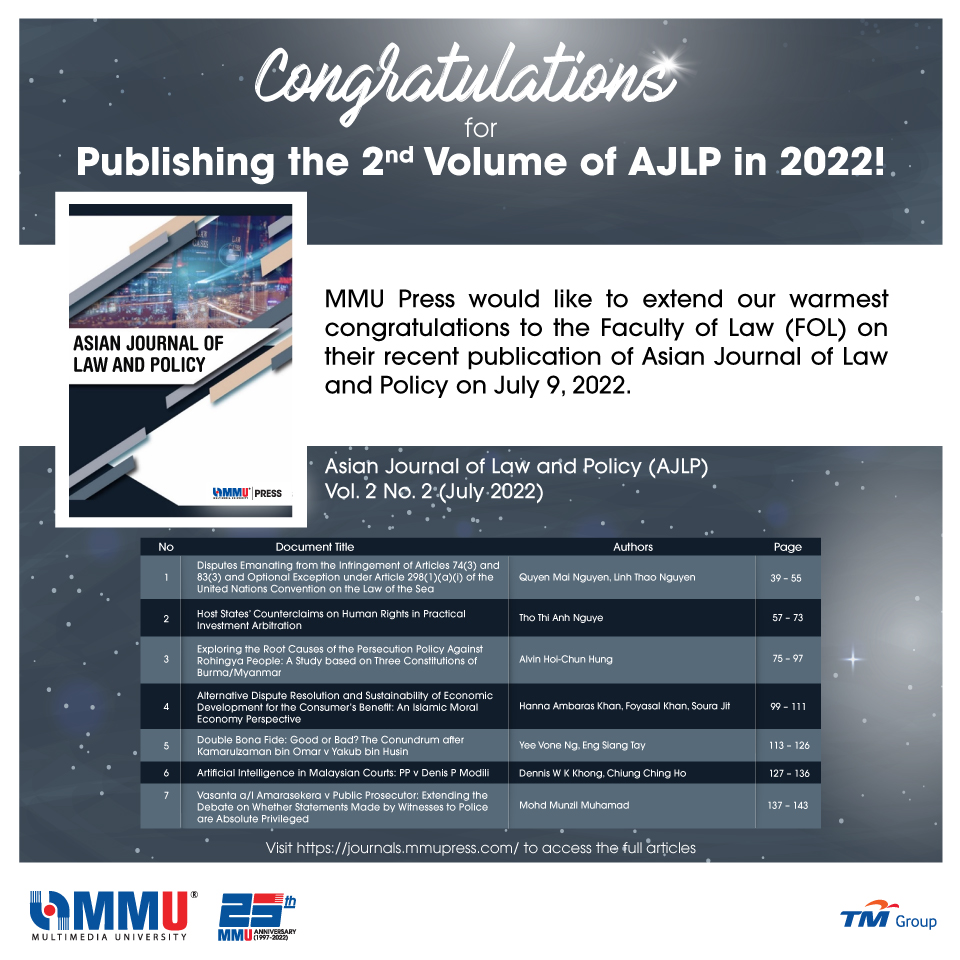
AJLP Vol. 2, No. 2 (July 2022)